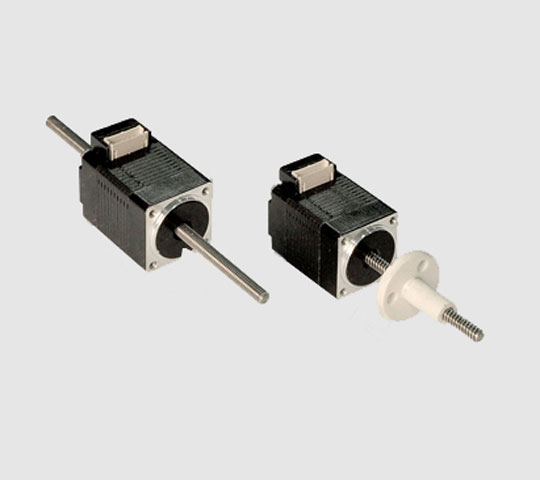
直线模组在组装时联轴器同心很重要,直接是影响到直线模组的精度。联轴器调整同心的方法按转动设备的安装位置分为卧式和立式两种,其中联轴器在直线模组中是卧式安装;
1.直线模组联轴器同心 调整的目的是使一转子轴的中心线为另一转子轴的中心线的延续曲线。因为两个转子的轴是用联轴器连接,所以只要联轴器的两对轮中心线是延续的,那么两转子的中心线也就一定是一条延续的曲线。2.直线模组联轴器调整状态分析 要使联轴器的两对轮中心是延续的条件:
(1)、使两个对轮中心重合,也就是使两对轮的外圆重合;
(2)、使两对轮的结合面(端面)平行(两中心线平行)。如果测的值不等,需要对地脚进行调整。联轴器两对轮若相对位置不正,则有两种状态:两对轮上张口、两对轮下张口。其中两对轮上张口又分为电机侧对轮高、电机侧对轮低两种,两对轮下张口又分为电机侧对轮高、电机侧对轮低两种。
3.直线模组联轴器对轮纠正计算
联轴器对轮纠正计算的理论依据是三角形相似原理。利用两个直角三角形相似得出所求量与已知量的关系,从而计算出所求的具体值。下面以状态一为例进行计算。分析:以转机侧对轮为基准,调整电机侧对轮的位置,使两对轮的相互位置符合要求。计算:设对轮的直径为D,电机侧ⅹ轴承地脚与其对轮的距离为l1,电机侧y轴承地脚与其对轮的距离为l,a:电机侧对轮相对于转机侧对轮的张口度,h:两对轮的高度差。
更多直线步进电机参数知识,请咨询覃工QQ:176340526